动态电路建模全解析:从物理直觉到控制数学
目录
1. 引言:为什么需要动态电路建模?
精密控制系统中的执行器(电机、压电陶瓷等)的电学行为常用动态电路模型描述。理解 RL、RC、RLC 电路的物理本质与数学模型,是掌握控制系统设计、稳定性分析与控制算法(如 PID)的基础。本文从物理直觉出发,构建电路数学模型,并阐明其与控制理论的联系。
2. 核心储能元件:系统的“性格”来源
动态系统的“性格”(如惯性、缓冲能力)主要由储能元件决定。在电路中,两大核心储能元件是电感和电容。
2.1 电感 (L):电流的惯性载体
- 物理本质:电感(线圈)利用“自感现象”抵抗电流的变化。它“讨厌”电流发生突变。
- 伏安特性 (VCR):
电感两端的电压 不取决于电流 的大小,而取决于电流变化的快慢(时间导数 )。 - 直观理解:
- 直流稳态:电流恒定 (
),电感相当于短路(导线)。 - 瞬态过程:若电流试图瞬间剧变,电感会产生巨大的反向电压来“抵制”这种变化。
- 直流稳态:电流恒定 (
- 控制论对应:电感代表系统的惯性,类似于机械系统中的质量,阻止状态(电流)的突变。
2.2 电容 (C):电压的缓冲蓄水池
- 物理本质:电容是电荷/电压的“缓冲区”,它“讨厌”电压发生突变。
- 直观理解:电容如同一个“水槽”,电流
注入使电压 缓慢上升。电容量 越大,电压变化越慢。 - 关键公式链条:
- 静态定义:
(电荷量 = 电容 × 电压) - 电流定义:
(电流是电荷随时间的变化率) - 动态 VCR:
(电流取决于电压的变化率)
- 静态定义:
- 精密控制关联:压电陶瓷 (PZT) 在电学本质上是一个大电容。驱动 PZT 快速位移,要求驱动器能瞬时提供大电流,否则电压(对应位移)无法快速响应控制指令。
3. 电路系统建模:从一阶到二阶
3.1 一阶 RL 电路:能量损耗与磁场存储
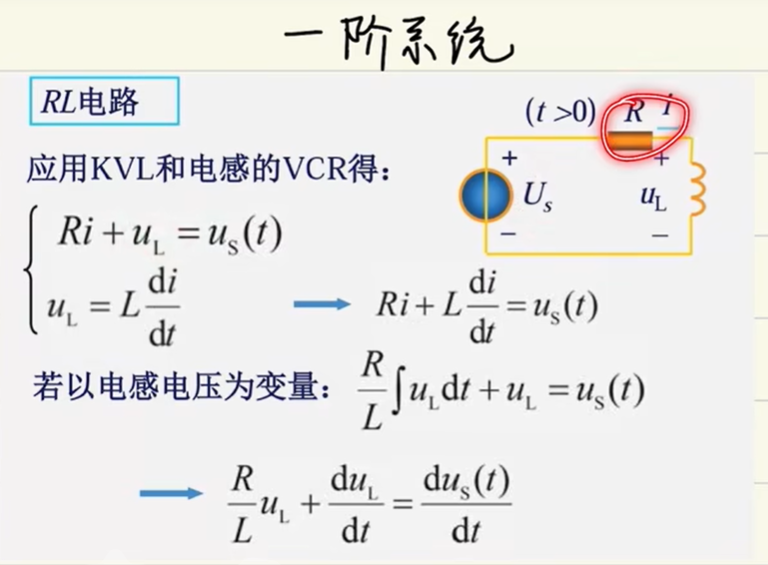
- 电路构成:电阻
(能量损耗)与电感 (磁场能量存储)串联。 - 建模方程(应用 KVL):
- KVL 直观理解:闭合回路电压降之和为零。电源电压
等于电阻压降 与电感压降 之和。
- KVL 直观理解:闭合回路电压降之和为零。电源电压
- 系统阶数:由于只包含一个独立储能元件(电感),描述系统的微分方程最高阶导数为一阶,故称为一阶系统。
3.2 一阶 RC 电路:能量损耗与电场存储
- 电路构成:电阻
(能量损耗)与电容 (电场能量存储)串联。 - 建模方程(两种等价形式):
- 以电流
为变量: - 以电容电压
为变量(更常用):
- 以电流
- 系统阶数:同样为一阶系统(仅一个独立储能元件
)。
3.3 二阶 RLC 电路:复杂动态平衡
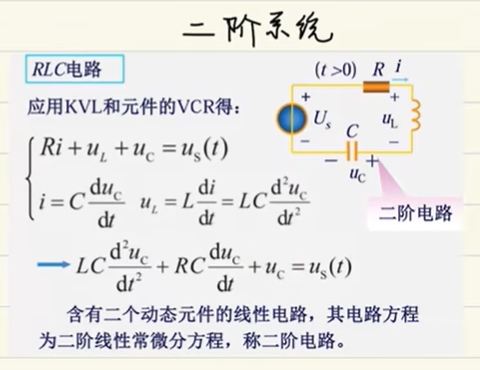
- 电路构成:电阻
(损耗)、电感 (磁场能)、电容 (电场能)串联。 - 物理意义:系统同时涉及两种能量的存储与转换,以及能量的耗散。
- 建模方程:由 KVL 可得:
对时间求导并整理,或以电容电压 为变量,可得到标准的二阶线性微分方程。 - 物理对称性:该方程的数学形式与机械系统的**“质量-弹簧-阻尼”** 模型完全对应:
- 电感
↔ 质量 (惯性) - 电容
↔ 弹簧刚度 (储能) - 电阻
↔ 阻尼系数 (耗能)
- 电感
- 系统阶数:包含两个独立储能元件(
和 ),方程为二阶系统。
4. 控制理论底层:线性系统的数学证明
控制理论的核心分析工具(如拉普拉斯变换、频域分析)依赖于线性系统假设。理解线性系统的数学本质至关重要。
4.1 线性系统的定义
一个系统是线性的,当且仅当它同时满足以下两个性质:
- 叠加性:若输入
产生输出 ,输入 产生输出 ,则输入 产生输出 。 - 齐次性:若输入
产生输出 ,则对于任意常数 ,输入 产生输出 。
常见误区:“二阶”不等于“非线性”。二阶指微分方程的最高阶导数为二阶,只要方程中输出
4.2 叠加性证明
考虑标准二阶线性微分方程:
定义线性算子
已知:
求证:当输入为
证明:
根据导数线性性质:
结论:叠加性成立。
4.3 齐次性证明
已知:
求证:对于任意常数
证明:
结论:齐次性成立。
因此,形如
5. 与精密控制的关联
5.1 为什么二阶系统如此重要?
大多数精密控制对象(如压电陶瓷、音圈电机)的动力学特性可用二阶系统近似,因为:
- 物理本质:它们通常包含惯性(质量)和弹性(刚度),并受阻尼作用,对应二阶微分方程。
- 数学完备性:二阶系统能表征振荡、超调、衰减、稳态误差等关键动态。
- 设计可行性:二阶系统的分析与综合方法成熟,便于控制器设计。
5.2 PID 控制与二阶系统的完美契合
PID(比例-积分-微分)控制器的三个参数(
- 比例 (P):影响系统刚度,类似于改变弹簧常数。
- 积分 (I):消除稳态误差,提高系统对常值扰动的抑制能力。
- 微分 (D):提供阻尼,抑制振荡,改善系统稳定性。
对于二阶系统,PID 可以调整其两个极点(决定固有频率和阻尼比),以满足上升时间、超调量等性能指标。若系统高于二阶,PID 参数可能不足,需要更高级策略。
5.3 压电陶瓷(PZT)的电学本质
从电路建模视角看,压电陶瓷(PZT)驱动器在电学上主要表现为一个大电容(可高达微法量级)。这意味着:
- 驱动需求:要实现 PZT 的快速伸缩(即快速改变其两端电压),驱动电路必须具备瞬时提供大电流的能力(根据
)。 - 控制挑战:大电容特性使得电压(对应位移)无法突变,系统具有固有的“惯性”。控制器设计必须考虑这一电气动态,否则可能导致响应迟缓或振荡。
- 模型简化:在分析机械位移时,常将其与电气模型结合,形成一个机电耦合的二阶系统。
6. 总结
- 储能元件定“性格”:电感(
)赋予系统电流惯性,电容( )赋予系统电压缓冲能力。它们是动态行为的根源。 - 电路模型是桥梁:一阶 RL/RC 电路是理解储能与耗能的基础。二阶 RLC 电路则完整刻画了惯性、弹性和阻尼的相互作用,并与机械系统直接类比。
- 线性性是基石:满足叠加性和齐次性的线性系统,使得强大的频域和复频域分析工具成为可能,是控制理论分析的起点。
- 二阶系统是主角:大多数精密执行器可用二阶系统近似,这为 PID 等经典控制器的有效应用提供了理论依据。
- 建模指导控制:理解被控对象的电路/物理模型(如 PZT 的大电容特性),是设计出高性能、高稳定性控制算法的前提。