控制系统概述
目录
1. 开环控制系统
开环控制系统根据控制策略的不同,可分为一般开环控制和前馈控制两种形式。
1.1 一般开环控制系统
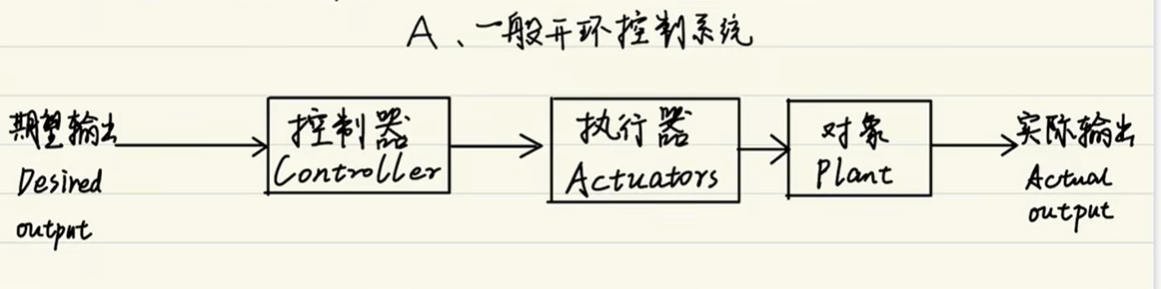
- 核心逻辑:一意孤行。 控制器仅根据预设指令或经验输出控制信号,不监测实际执行结果。
- 关键特征:无反馈回路,系统无法感知实际输出
与期望输出 之间的误差。 - 主要缺点:对外部干扰(如风力、电磁噪声)和内部变化(如材料老化、摩擦)缺乏补偿能力,控制精度完全依赖于模型的准确性和环境稳定性。
- 典型应用:定时微波炉、步进电机的简单位置控制(无位置反馈)。
1.2 前馈控制系统
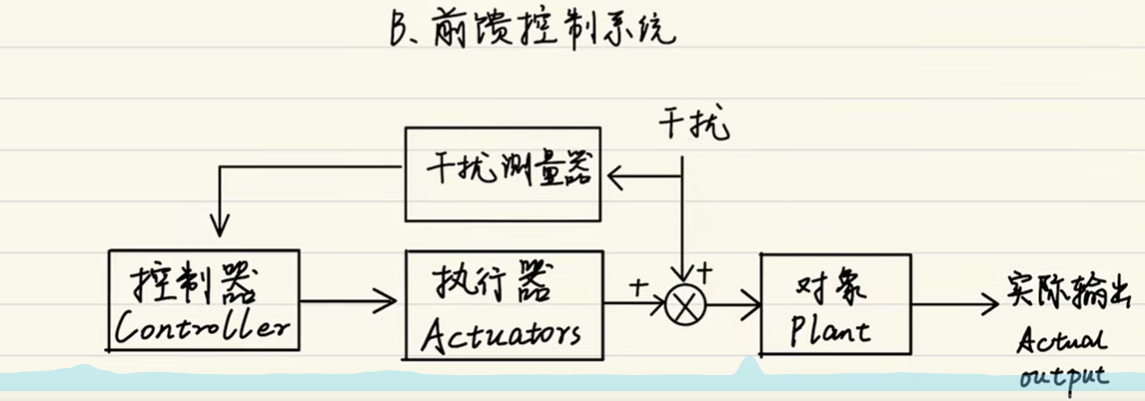
- 核心逻辑:未雨绸缪。 在干扰影响输出之前,主动测量干扰并提前施加补偿。
- 关键特征:基于“预判”而非“反应”。它测量的是误差的原因(干扰),而不是误差的结果(偏差)。
- 主要优势:显著降低系统的响应滞后。在压电陶瓷等高动态系统中,常用于补偿已知的机械滞后、非线性等确定性干扰。
- 局限性:依赖对干扰的精确测量或预测模型。对未知或随机干扰无效。
- 典型应用:数控机床中的刀具温度补偿、精密运动平台中的摩擦前馈。
2. 闭环控制系统
闭环控制系统通过引入反馈,使系统具备自我校正能力,是现代精密控制的核心。
2.1 单闭环控制系统
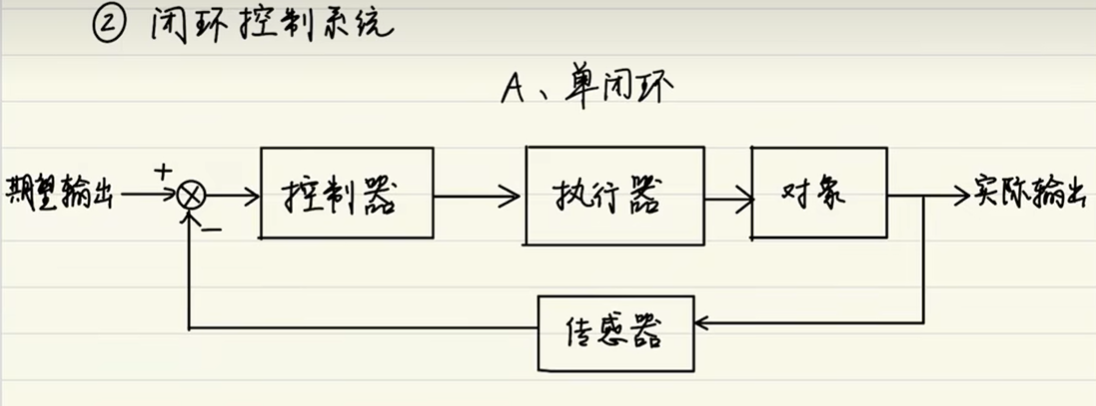
- 核心逻辑:知错就改。 通过传感器监测实际输出,并与期望值比较,根据误差实时修正控制指令。
- 关键特征:形成反馈回路。控制器根据误差
进行决策。 - 主要优势:具备自适应能力,可自动消除稳态误差,抵抗未知干扰,显著提高系统精度和鲁棒性。
- 典型应用:恒温箱、伺服电机位置控制、大多数工业过程控制。
2.2 双闭环控制系统
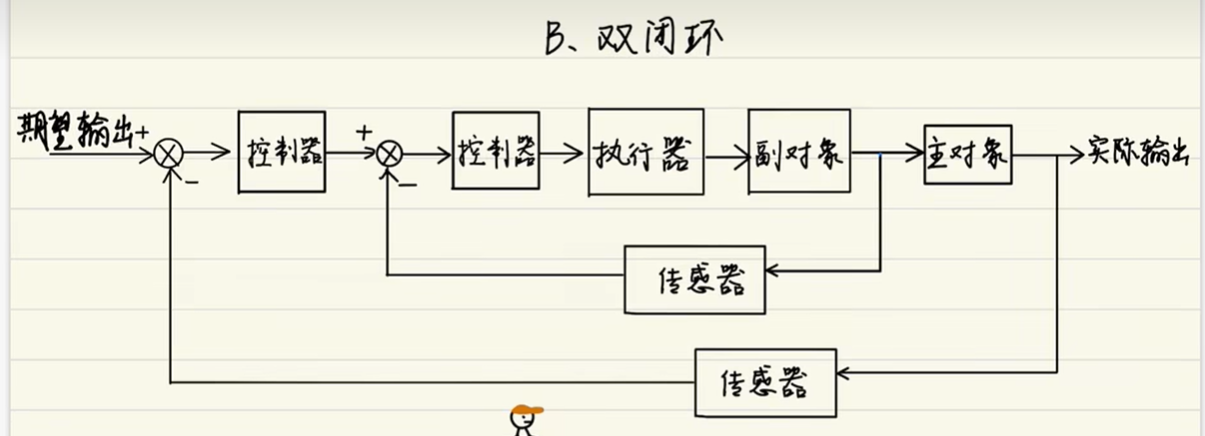
双闭环(又称级联控制)系统采用主从结构,将控制任务分解,实现更优的动态性能。
结构:主从(Master-Slave)关系
- 外环(主回路):负责“大局”。监控最终目标(如位移、速度),其输出是给内环的设定指令(如目标电压、目标电流)。
- 内环(副回路):负责“细节”。快速、精确地跟踪外环指令,并抑制内部的快速扰动(如电路噪声、负载突变)。
执行策略:频率不对称的“嵌套执行”
在实际的 FPGA/DSP 实现中,通常采用内环频率远高于外环的策略(通常为 5~10 倍)。
- 执行流程:
- 外环计算:读取传感器,计算误差,经外环控制器(如位置 PID)输出一个“目标电压
”。 - 内环高频执行:在下一个外环采样周期前,内环(如电流/电压环)以更高频率采样并调整,确保实际电压紧紧跟随
。
- 外环计算:读取传感器,计算误差,经外环控制器(如位置 PID)输出一个“目标电压
- 设计原理:内环足够快,才能在干扰传播到最终输出(如位移)之前,就在内部将其抑制。这如同“御敌于国门之外”。
典型应用
- 电机控制:外环为速度/位置环,内环为电流环。
- 压电陶瓷控制:外环为位移环,内环为电压环或电荷环。
3. 前馈-反馈复合控制系统
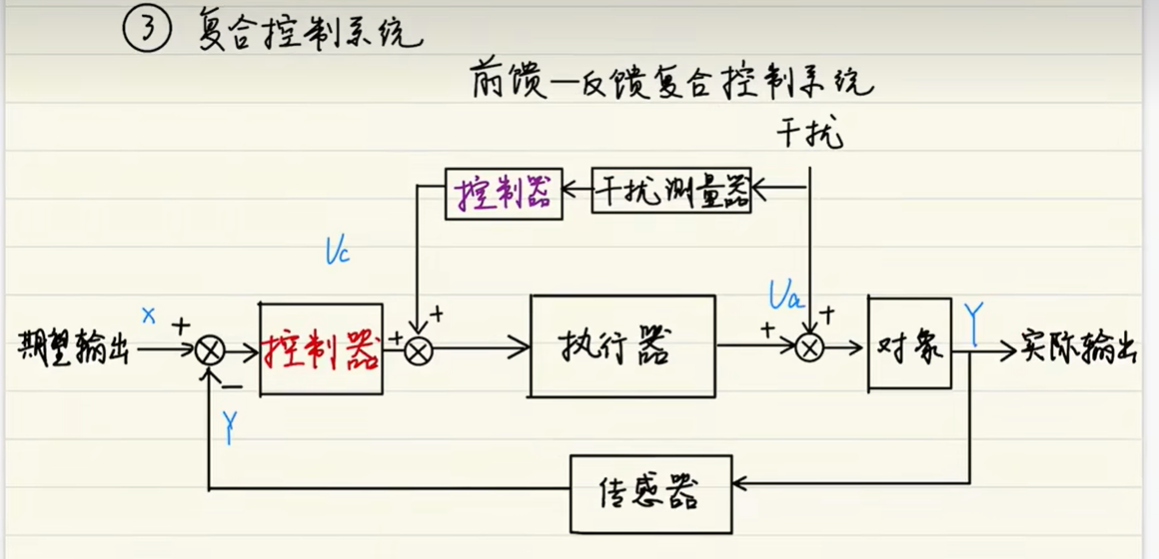
复合控制融合了前馈的“主动性”与反馈的“鲁棒性”,是高性能精密控制系统的常用架构。
- 前馈(Feedforward):主动进攻。针对已知、可测的干扰(如模型逆、摩擦、重力)进行提前补偿,旨在从源头上消除误差。
- 反馈(Feedback):防守反击。针对未知扰动、模型失配等造成的残余误差,根据测量偏差进行纠正。
- 核心价值:结合了两者的优势。前馈提供快速响应,减少滞后;反馈保证最终精度和稳定性。这有效解决了单纯 PID 调节中动态响应与稳态精度之间的矛盾。
- 设计要点:前馈与反馈需协同设计。前馈模型精度越高,反馈回路的负担越轻,系统性能越优。
- 典型应用:高性能运动平台、机器人轨迹跟踪、精密加工中心。
4. 参数详解
下表从精密控制视角明确定义了控制系统图中的核心变量:
| 符号 | 中文名称 | 英文名称 | 定义与物理含义 |
|---|---|---|---|
| 设定值 | Setpoint / Reference | 期望的系统输出,是控制器的目标。 | |
| 误差 | Error | 期望减去现实,即 |
|
| 控制器输出 | Controller Output | 控制器的决策指令。指图中反馈控制器(红字部分)输出的控制信号,决定了为修正误差所需施加的“控制力”。 | |
| 执行器输出 | Actuator Output | 驱动执行器的真实物理量。在压电控制中,通常指功率放大器输出的高压信号,已包含前馈补偿的叠加。 | |
| 系统输出 | System Output | 被控对象的实际物理状态。如压电陶瓷的真实位移(亚纳米级),是传感器的测量对象。 | |
| 干扰 | Disturbance | 影响系统输出的外部或内部不利因素,如力、热、噪声等。 |
总结
控制系统的架构选择取决于对精度、速度、鲁棒性、成本的综合权衡。
- 开环:简单、成本低,但精度依赖于环境和模型,适用于扰动小、要求不高的场景。
- 单闭环:引入反馈,显著提升精度和抗扰能力,是大多数控制应用的基础。
- 双闭环:通过级联结构,将快速内环与慢速外环解耦,进一步提升动态性能和抗扰性,适用于高性能伺服系统。
- 复合控制:融合前馈与反馈,兼顾响应速度与稳态精度,代表了精密控制领域的先进架构。
理解这些基本结构是设计、分析和调试任何控制系统的前提。